Оборудование и ПО
Главная » Оборудование и ПОБПЛА
Для проведения экспериментальных исследований в проектах применяются БПЛА различных типов. Индустриальный Партнер, Ижевская компания ФИНКО (www.unmanned.ru ) предоставляет для исследований весь свой модельный ряд профессиональных БПЛА самолетного и вертолетного типа http://unmanned.ru/uav/ .

Полевая лаборатория «ПАВЛИН Техно» содержит также ряд БПЛА, представляющих собой модифицированные радиоуправляемые авиамодели:
— AR.Drone (квадрoкоптер);

— Ряд малоразмерных авиамоделей с размахом крыла от 0.5 м до 2 м, применяющихся в качестве экспериментальных целей в проекте по оптическому обнаружению малоразмерных летательных аппаратов.

Бортовые компьютеры
В настоящий момент исследуется возможность применения бортовых вычислителей различных производителей (в том числе с высоким соотношением производительности к цене)
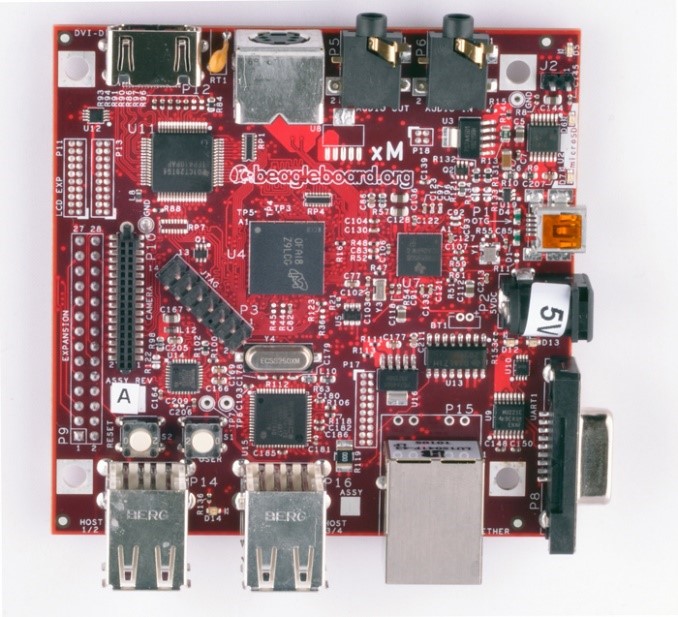
Процессорная плата Beagleboard™:
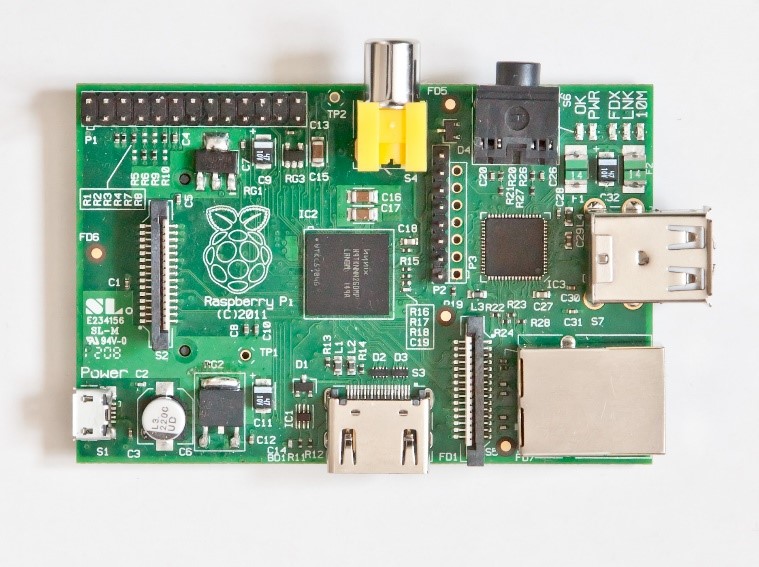
Процессорная плата Raspberry Pi™:
Процессорная плата Wandboard ™:
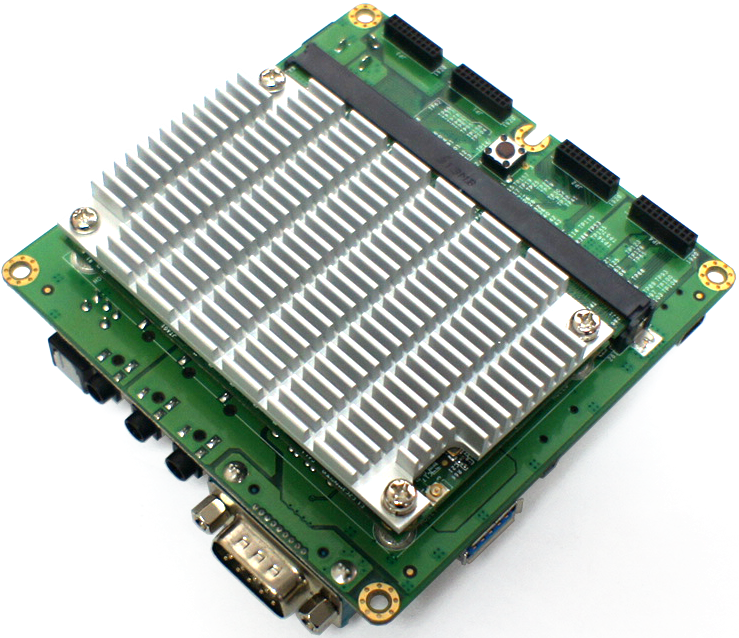
Wandboard ™ на основе FreeScale IMX6-архитектуры поддерживает аппаратную плавающую точку (hardfloat) и многоядерные вычисления и позволяет в достичь повышения производительности вычислений с плавающей точкой в 4.5 раза по сравнению с процессорной платой Beagleboard™, а относительно системы с процессорной платы Raspberry Pi™ в 2.7 раз (по результатам теста opencv_test_core на одном ядре). Wandboard ™ позволяет использовать OpenCL для GPGPU вычислений, что позволяет использовать видеоадаптер процессорной платы Wandboard ™ с производительностью в 30 GFLOPS для работы над задачами бортовой интеллектуальной обработки данных.
Производительность по тестам
|
|
Beagleboard™ |
Raspberry Pi™ |
Wandboard ™ |
|
Время выполнения теста opencv_test_core |
3557943 мс |
2085207 мс |
772299 мс |
|
Поддержка вычислений с плавающей точкой |
armel |
armhf |
armhf |
|
Поддержка OpenCL |
НЕТ |
НЕТ |
ЕСТЬ |
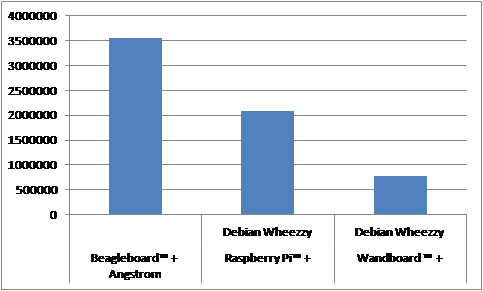
Время выполнения стандартного теста производительности opencx_core_test (данные в миллисекундах)
Специализированные вычислители. Нейропроцессоры
Одна из основных научно-технических задач в наших проектах – разработка бортовой системы распознавания и сопровождения объектов для беспилотных летательных аппаратов, работающих с минимальным участием оператора. Несложные задачи распознавания визуальных образов успешно решаются на ПЭВМ, например, всем известная программа FineReader (ABBY) осуществляет распознавание текста, более сложные задачи распознавания могут решаться с привлечением графических процессоров. Однако беспилотный летательный аппарат обладает существенными ограничениями в грузоподъемности и мощности бортовой сети питания электронной аппаратуры. При этом задача распознавания объектов с БПЛА является сложной в виду большой вариативности образов, недостатка разрешения, возможных шумов и иных проблем, связанных со съемкой движущихся объектов при естественном (уличном) освещении. Данное сочетание повышенной сложности задачи распознавания и ограниченности ресурсов приводит к задаче поиска оптимальной архитектуры бортового вычислителя. На рисунках ниже приведены сравнительные характеристики быстродействия характерных представителей из различного класса высокопроизводительных вычислительных устройств – от суперЭВМ до специализированных микросхем.
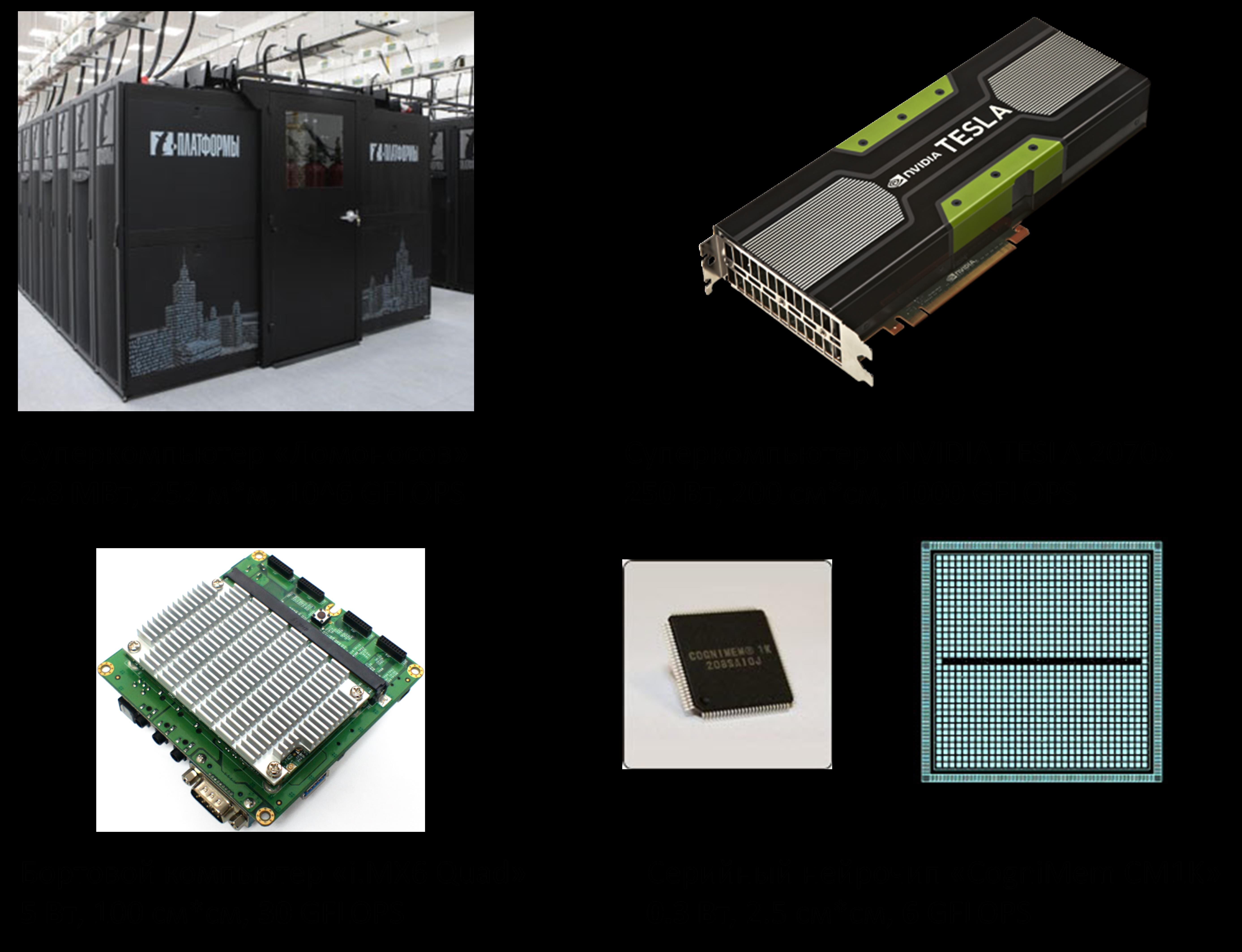
Характерные представители различных классов вычислительных устройств и их основные характеристики.
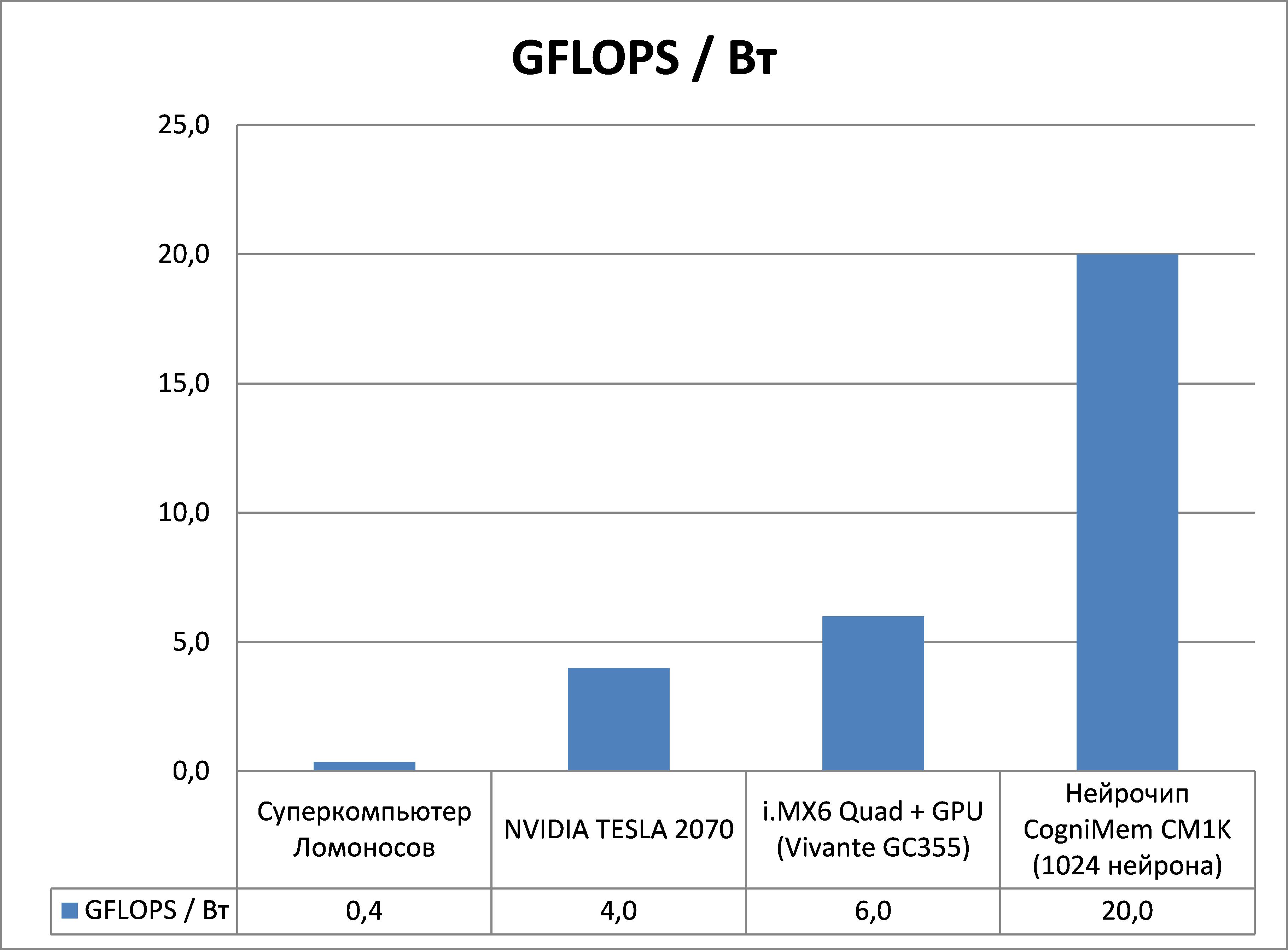
Отношение производительности к потребляемой мощности для характерных представителей различных классов вычислительных устройств и их основные характеристики.
Легко заметить, что среди приведенных представителей высокопроизводительных вычислителей с массовым параллелизмом наилучшего соотношения вычислительной производительности к потребляемой мощности удается достичь аппаратным реализациям нейросетевых архитектур. Второе место занимают графические процессоры для мобильных устройств. Поддержка для них технологий параллельного программирования GPGPU (Например, Vivante GC355 поддерживает OpenCL, NVIDIA выпускает платформу Tegra с поддержкой CUDA). Тем не менее, разрыв первого места относительно второго настолько радикален, что в условиях дефицита грузоподъемности и мощности бортовой сети питания (и запаса аккумуляторных батарей) с высокой вероятностью оптимальным выбором аппаратной поддержки для бортовых систем перспективных БПЛА станут нейросетевые архитектуры. С 2011 г. в продаже появились серийно производимые микросхемы аппаратно реализующие нейросетевые вычисления. Например, компания Cognimem Inc. производит нейрочип, потребляющий 0.3 Вт и осуществляющий распознавание одного образа нейронной сетью из 1024 нейронов при 256-мерном векторе признаков всего за 10 микросекунд. В планах компании на 2014 г. (!) выпуск следующего поколения нейрочипов, которые поддерживают в несколько раз больше нейронов и работают еще в 10 раз быстрее. В ПНИ планируется исследовать оба возможных направления – применение аппаратно реализованных нейросетевых архитектур и эмуляцию нейросетевых алгоритмов на мобильных графических процессорах.
Камеры
В наших проектах мы используем различные камеры (традиционные камеры, oem, с интерфейсами различного типа). В данном разделе будет описываться опыт применения различных камер и объективов.
Контроллеры
ООО «ПАВЛИН Техно» исследует возможность применения специализированного контроллера периферийной аппаратуры, разработанной в дочерней компании ООО «МИРП – Интеллектуальные Системы», представляющий собой высокопроизводительный «сендвич», бортовой компьютер типа Wandboard, подключаемый по стандартизованному EDM разъему и контроллер датчиков и сенсоров на основе микропроцессора STM-32.
